Motion和Drive之安全关断 (STO) 的发展历程
2016-06-16 罗克韦尔自动化
 与我们联系,请点击这里
与我们联系,请点击这里
Motion和Drive之安全关断 (STO) 的发展历程
1.简介
最早的安全关断功能(STO)是在驱动器上插上机电式继电器选件,后来使用固态电子继电器方便和安全继电器硬接线。发展到今天驱动器内部的嵌入式固态电子继电器电路可以通过安全通讯实现了网络连接。
2004 Electromechanical Relay Option 机电式继电器选件
2008 Inlayed Solid State Electronic Relay 嵌入式固态电子继电器
2013 CIP Safety Safe Torque Off 通用工业协议(CIP)安全关断
2.机电式继电器的硬接线安全关断STO
有了安全关断(STO)功能驱动器的电源可以被安全断开,电机输出轴将没有转矩输出,因此机器负载不会产生任何的危险动作。这个功能是通过关闭驱动器内部的绝缘栅双极晶体管(IGBT)门控制来实现的。对于PLd和Cat.3安全等级,一般需要使用独立的路径使用双通道门控制去关闭IGBT的触发相位。
安全PLC或者安全继电器监控机器上的防护门或者紧急停止按钮的状态,如果防护门被打开,通过关闭IGBT门控制起动功能,机器将停止并不能重新起动。这个禁止功能是通过两个独立的路径来实现:
1.PLC通过硬件使能禁止输出到IGBT功率单元的中断门脉冲信号
2.安全关断信号断开逆变门控制的电源
这样,逆变器的半导体功率桥将不再工作。
两个检测失效通道的监控由以下方法来实现:
1.监控关断继电器的辅助反馈触点,这个关断继电器包含机械联锁触点,这样反馈触点和主触点可以同步开关动作。
2.在关断触点上使用脉冲测试(Pulse Test),安全继电器输出短脉冲电压到继电器线圈和反馈触点上,继电器的输入监控脉冲反馈检测两个通道是否有短路等异常错误。
这个测试功能通常在电机起动前执行:

图1 PLd, Cat.3 安全关断
图1中Drive提供了两个独立的安全关断通道和一个反馈触点,通过继电器和驱动器之间的配合实现Cat .1 Stop的安全停止功能。
对于PLe和Cat.4系统来说需要两个独立的关断电机转矩的通道。第一个通道连接驱动器的SafeTorqueOff (STO),第二个连接外置的安全接触器。
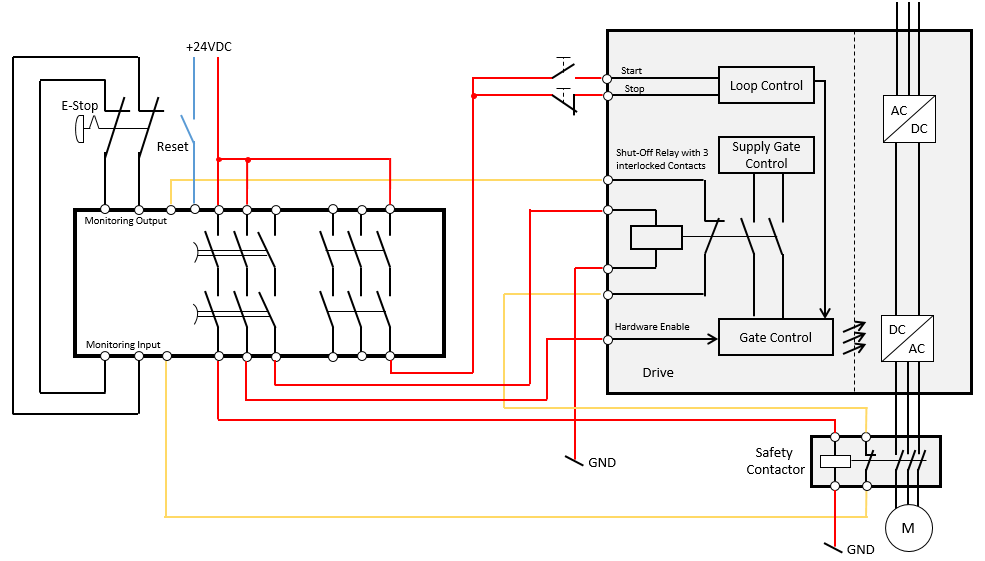
图2 PLe, Cat.4 安全关断
图2中驱动器提供了两个独立的安全关断通道和一个反馈触点,通过继电器和驱动器之间的接线实现Cat 1 Stop的安全停止功能。第一个安全关断通道是硬件使能(Hardware Enable),它仅仅用于门控制,本身没有相关的安全功能。第二个安全关断通道是连接在驱动器和电机之间的安全接触器。
3.固态电子继电器的硬件STO
这种方式是将安全控制和监控内置在了驱动器内部,相对于机电式开关,固态电子继电器更加稳定可靠。它的故障率主要取决于上电时间和工作温度,而不是触点动作次数。这样使得随机的设备故障更具有预测性。
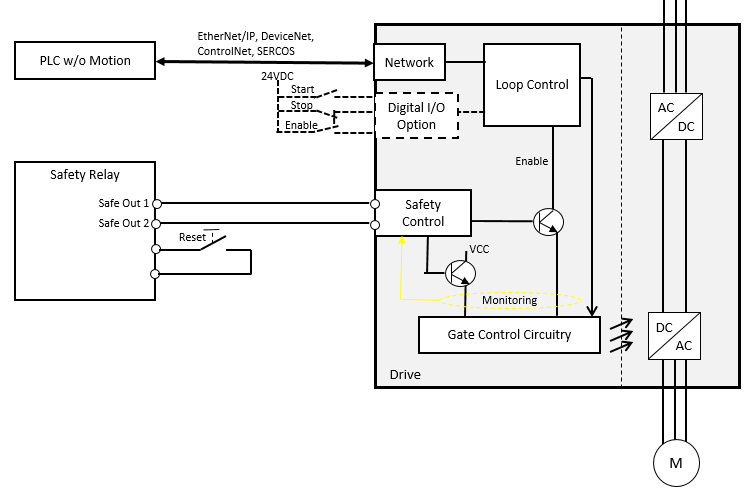
图3固态电子继电器的硬件STO
相对于图1和图2,图3中继电器和驱动器之间的硬件接线特别少。网络连接主要做驱动器控制和监控,比如驱动器启动停止,错误状态监控等等。当然数字量 I/O也可以作为选项用于驱动器的控制。
4.CIP Safety安全网络STO
有了CIP Safety网络,没必要在每个网络之间安装昂贵的和难以维护的网关。在安全网络发展之前,工程师经常使用小的系统来做或者降低安全性能要求,因为硬接线的门锁开关和安全继电器很难集成到一个完整的自动化系统中。现在有了安全网络就可以集成安全设备到标准网络中,这样就可以在输入设备,控制器和输出设备之间允许安全和标准信息的传送。
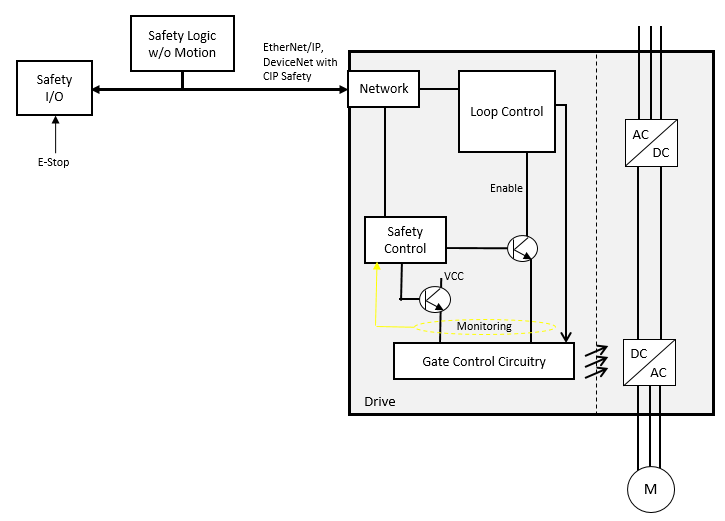
图4 CIP Safety安全网络STO
新一代的STO驱动器可以使用内置了CIP Safety的EtherNet/IP或者DeviceNet网络方式实现安全扭矩关断功能。网络连接不仅可以实现闭环控制,减少硬件接线,还能提供很多和安全有关的诊断信息,甚至可以达到PLe, SIL 3 Cat.4 STO的安全性能。
5. PowerFlex和Kinetix应用案例
5.1系统类别 (System Category) Cat.3,性能等级 (Performance Level) PLd
5.1.1 PowerFlex 40P/70/700S
性能等级Performance Level: PLd
系统类别System Category: Cat.3
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off
安全监控设备Supervisory Safety Device: Safety Relay with delayed contacts
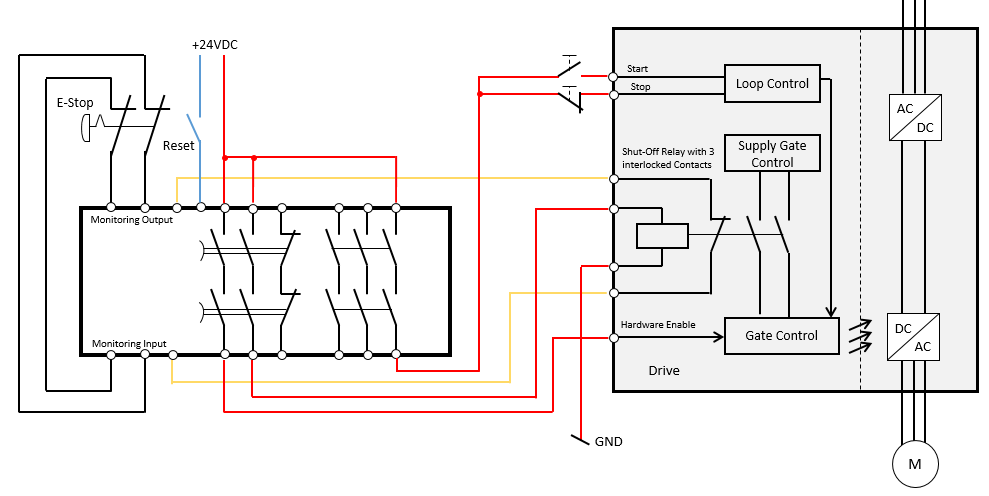
图5
图5中的变频器或者伺服驱动器内置了一个关断继电器,继电器内的互锁反馈触点用于监控关断的状态。
起动和停止输入以及硬件使能信号连接到安全继电器上。起动和停止输入接到继电器的立即断开触点上,硬件使能接到继电器的延迟断开触点上。当电机停止时,安全继电器会断开IGBT门控制的电源,因为使用了两个断开触点和一个反馈触点,保证了安全关断STO功能的执行。
按下紧急停止按钮激活了停止信号并且电机可控停止,硬件使能信号关闭后延迟断开STO,这个延迟时间可以在继电器面板上通过旋钮开关选择。
5.1.2 Kinetix 6000/6000IDM/7000
性能等级Performance Level: PLd
系统类别System Category: Cat.3
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off
安全监控设备Supervisory Safety Device: Safety Relay with delayed contacts
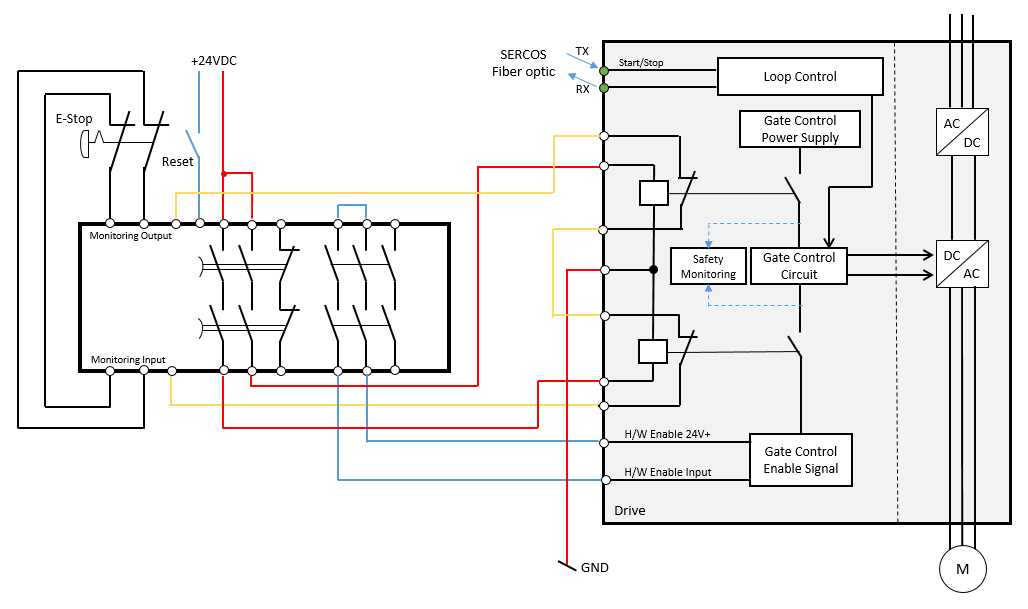
图6
驱动器内部包含两个关断继电器,还有两个互锁的反馈触点用于监控继电器关断状态。硬件使能信号也接到安全继电器上并短接。驱动器的起动停止指令由SERCOS网络控制。
当电机停止时,安全继电器会断开IGBT门控制的电源,因为使用了两个断开触点和一个反馈触点,保证了安全关断STO功能的执行。
按下紧急停止按钮激活了停止信号并且电机可控停止,硬件使能信号关闭后延迟断开STO,这个延迟时间可以在继电器面板上通过旋钮开关选择。
5.1.3 PowerFlex 525/Kinetix 300/Kinetix 350
性能等级Performance Level: PLd
系统类别System Category: Cat.3
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off
安全监控设备Supervisory Safety Device: Safety Relay with delayed contacts
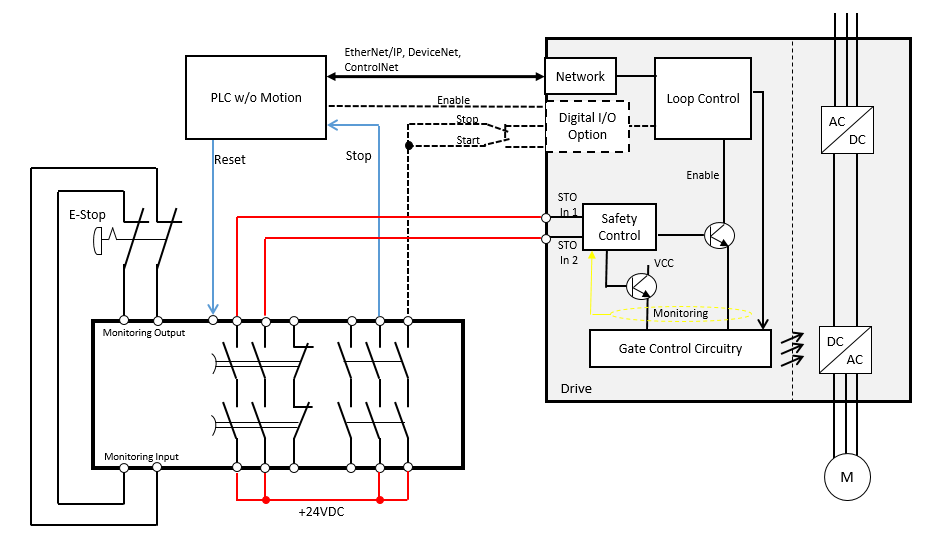
图7
驱动器包含用于安全控制的固态电子继电器。
总线连接仅提供非安全的连接,比如运动控制状态和运动控制指令,还有继电器停止和复位的状态。驱动器上的硬件接线的使能/起动/停止和停止/复位也可以部分代替网络连接。
如图7,紧急停止按钮立即激活PLC Stop Input并且通过网络驱动器执行可控停止。硬件接线的驱动停止输入也可以交替使用。过了最大停止时间延迟后,STO IN1和STO IN2变成低电平执行STO安全关断。
5.2 System Category 4, Performance Level e
5.2.1 PowerFlex 40P/70/700S
性能等级Performance Level: PLe
系统类别System Category: Cat.4
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off
安全监控设备Supervisory Safety Device: Safety Relay, Safety Contactor
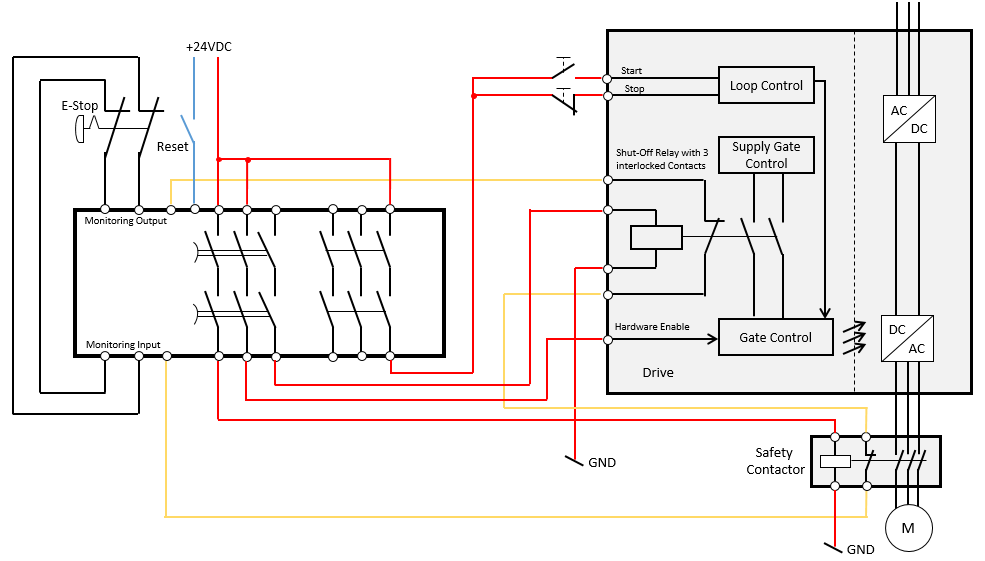
图8
变频器或者伺服驱动器包含一个关断继电器,还有监控关断状态的互锁的反馈触点。在驱动器和电机之间加一个安全接触器,用于切断电机三相电源。接触器的互锁反馈触点接到安全继电器上。
驱动器的起动和停止输入接到安全继电器的立即断开输出上。硬件使能,关断继电器和安全接触器接到安全继电器的延迟断开输出上。
当电机停止时,安全继电器断开IGBT门控制和安全接触器的电源,通过监控关断继电器和安全接触器的状态,保证STO的正常执行。如图8,紧急停止按钮触发停止输入并且驱动器执行可控停止。过了最大延迟时候后,关断继电器被禁止,安全接触器断开。
5.2.2 PowerFlex 753/755, Kinetix 5500/6200/6500
性能等级Performance Level: PLe
系统类别System Category: Cat.4
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off
安全监控设备Supervisory Safety Device: Safety Relay, no Safety Contactor required
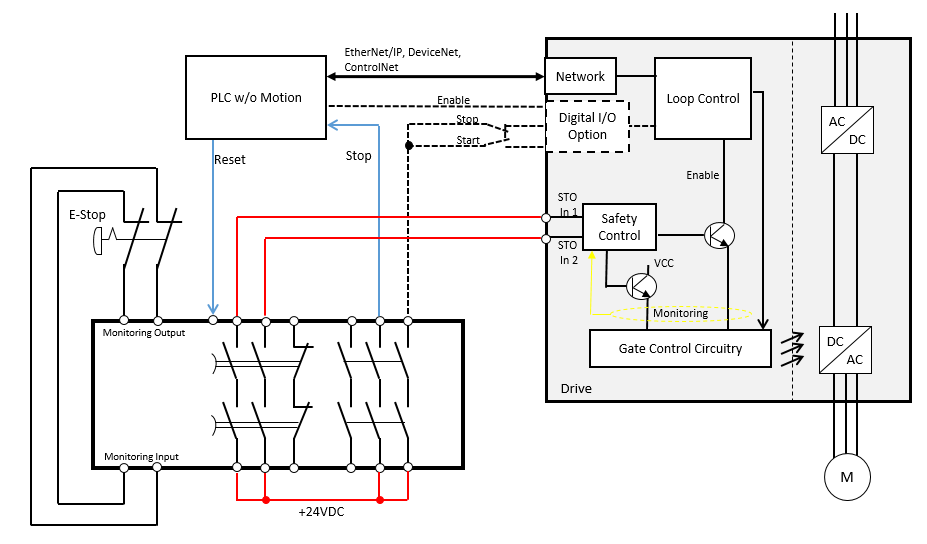
图9
驱动器包含用于安全控制的固态电子继电器,总线连接提供运动控制状态和指令,硬件数字量I/O也可以部分代替网络控制。
如图9,紧急停止按钮立即激活PLC Stop Input并且通过网络驱动器执行可控停止。硬件接线的驱动停止输入也可以交替使用。过了最大停止时间延迟后,STO IN1和STO IN2变成低电平执行STO安全关断。
5.2.3 PowerFlex 527, Kinetix 5500ER2, Kinetix 5700
性能等级Performance Level: PLe
系统类别System Category: Cat.4
停止类别Stop Category: Cat.1, Controlled Stop
安全功能Safety Functionality: Safe Torque Off (STO)
安全监控设备Supervisory Safety Device: Safety PLC with or without Motion
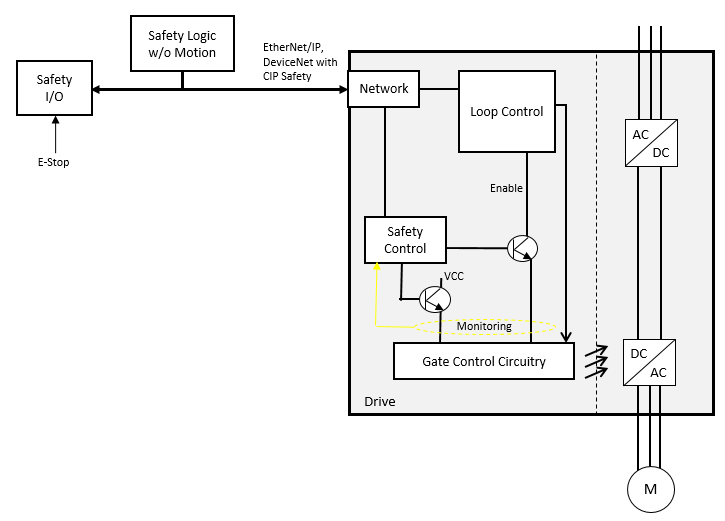
图10
驱动器包含用于安全控制用的固态电子继电器。网络连接提供所有的安全相关的CIP Safety 信息和/或运动控制状态和控制指令,无需硬件I/O信号连接。这个网络提供了很多状态信息。
如图10,紧急停止按钮立即激活PLC Stop Input并且通过网络驱动器执行可控停止。过了最大停止时间后, STO信息关闭了电机输出轴输出转矩。
